|
<< ステージ 2 >>
|
サイボットを外部からコントロール〜音声認識で命令せよ! |
|
|
|
|
|
サイボットを外部からコントロールする ため、新たに「ハンドセット」の製作に 取り掛かる |
|
|
|
|
|
|
|
ハンドセットは、ゲーム用コントローラ みたいなカタチをしていた |
|
|
|
|
|
|
|
内部に色々と基盤を組み込んでいく |
|
|
|
|
|
|
|
とりあえず、ハンドセットが完成? 液晶パネルでゲームも出来るぞ! |
|
|
|
|
|
|
|
サイボットの本体側にも、赤外線を受信 するコントローラを取り付ける |
|
|
|
|
|
|
|
これでようやく、サイボットを外部から コントロール可能となった(はず?) |
|
|
|
|
|
|
|
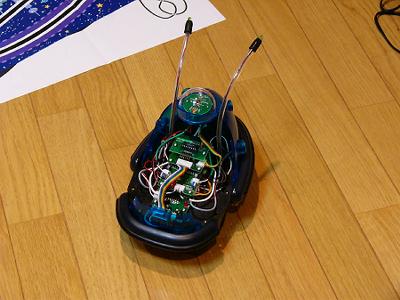
この段階のサイボットとハンドセット 白いサイドパネルは邪魔なので、当分 外しておくことにした |
|
|
|
|
|
|
|
赤外線コントロールによる初走行 おお!動く!動く! |
|
|
|
|
|
|
|
ただし、この段階では単なるリモコン ロボットに過ぎない |
|
|
|
|
|
|
|
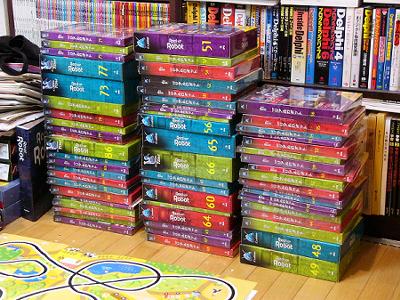
バラバラだった残りの号を番号順に 並べてみる まだまだ「完成」までの道のりは 果てしなく遠い |
|
|
|
|
|
|
|
続いて、サイボット本体に音声認識 ボードを追加する |
|
|
|
|
|
|
|
ドッキングステーションを追加 |
|
|
|
|
|
|
|
音声コントローラの製作を開始する これは「ヘッドセット」と呼ばれる 装置で、これを作ればサイボットに 自分の「声」で命令できるらしい |
|
|
|
|
|
|
|
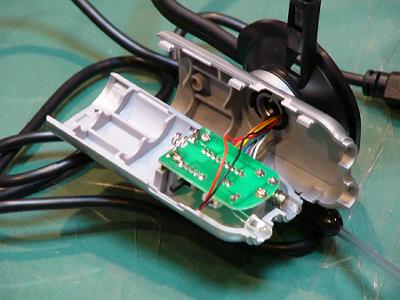
こっちの内部に赤外線コントローラを 取り付ける 豆電球も光るみたいだ! |
|
|
|
|
|
|
|
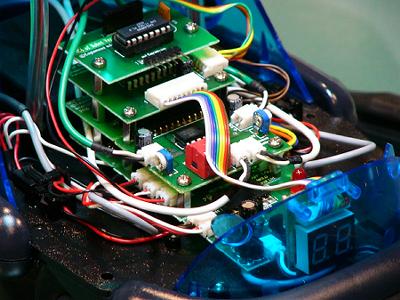
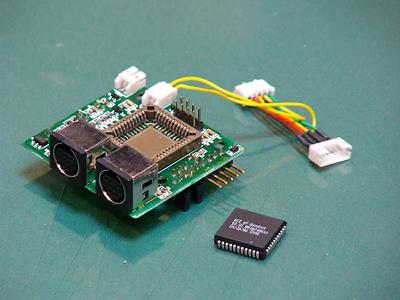
これが音声認識プロセッサの心臓部分 ハンドセットの内部に組み込まれる |
|
|
|
|
|
|
|
完成したヘッドセットを頭にかぶり マイクからサイボットに命令すると サイボットがキミの声に反応しつつ 動き回るぞ! |
|
|
|
|
|
|
|
早速遊んでみた3人の子供たち 「サイボット、マエへ!」 「サイボット、トマレ!」 「サイボット、モドレ!」 全般的に、大人も子供も結構興奮した 第2ステージだった! |